Twenty Thousand Leagues Under the Sea had Nemo’s Nautilus. Voyage to the Bottom of the Sea featured the Seaview. Fantastic Voyage even sent a submarine into the human body at the capable hands of Captain Bill Owens. Fiction often presages fact, and it seems that submarines may turn out to be the new hotness in planetary exploration, although their fearless skippers will remain back on Earth.
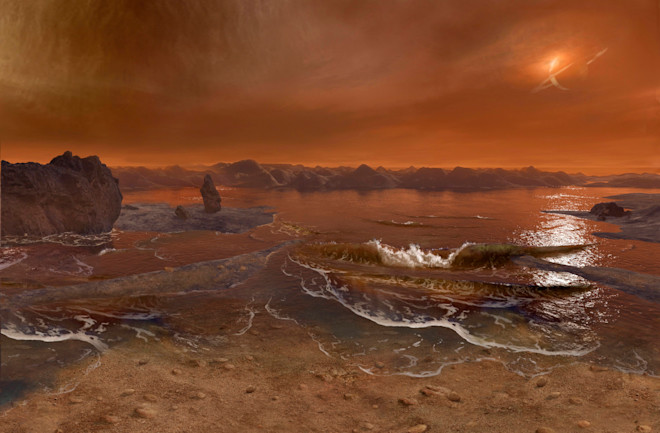
The solar system is awash with oceans. Unlike the majority of Earth’s seas, these ubiquitous brines are locked away beneath ice crusts. But they’re there, lurking under the surfaces of Ganymede, Europa, Enceladus, and perhaps other worlds like Titan, Dione, and Pluto. These maritime sites may provide the best venues for life beyond Earth, but getting to them is the tricky part. In the case of Jupiter’s ice moon Europa, its 60-mile-deep (100 kilometers) ocean ebbs and flows beneath miles of solid ice, which blocks direct access.
Many engineers now believe that the best way to search for life in these deep waters is to deploy a modern-day Nautilus. But sending a probe to Jupiter’s moon, and safely down to the surface, through the ice, and into the ocean, is a daunting prospect to say the least.
It’s just the kind of challenge that fires the visions of engineers, and a few brave souls are taking the vision beyond imagination and into the practical world. One of them is William Stone, the founder of Stone Aerospace, a Texas-based company that develops both the tools and systems needed to explore the modern frontier of space. Recently, Stone led a team atop Alaska’s Matanuska Glacier. There, engineers tested a cryobot (a robot that can penetrate ice) called the Very deep Autonomous Laser-powered Kilowatt-class Yo-yoing Robotic Ice Explorer (VALKYRIE). VALKYRIE is one of many submersible robotic explorers that engineers are studying, hoping one day to investigate the oceans of other worlds.